
|| 次元を厳密に定義するためのもの
「ベクトル」の主な役割の1つになります。
スポンサーリンク
目次
線型独立「同一直線上に無い感じ」
標準基底「最も単純な形をした基底」
線形包「ベクトルの定数倍と和で作れる全ての点」
基底の存在定理「ベクトル空間には基底が必ず存在する」
基底の要素数の唯一性「基底の要素数で次元を定義する」
基底の延長定理「部分空間の存在から全体に延長できる」
ベクトル Vector
この記事は「ベクトル」を知らないと
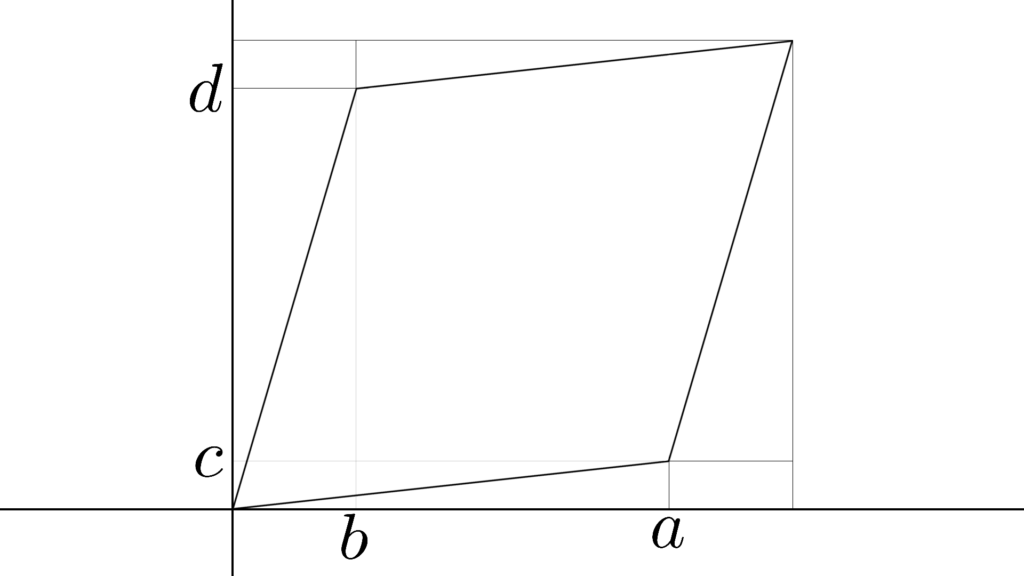
\begin{array}{lcl} v_1&=&(a,c) \\ \\ v_2&=&(b,d) \end{array}
だいぶ分からない内容になっています。
線型空間 Linear Space
これは「ベクトル」を問題なく使える保証のことで
\begin{array}{cccccc} \displaystyle v,u,w&∈&V &&V \,\, \mathrm{is} \,\, \mathrm{Set \,\, of \,\, Vector} \\ \\ a,b&∈&S &&S \,\, \mathrm{is} \,\, \mathrm{Scalar \,\, Field} \end{array}
「ベクトルの振る舞い」をまとめたものになります。
\begin{array}{cccccccc} \displaystyle (v+u)+w&=&v+(u+w) &&\mathrm{Associative} \\ \\ v+u&=&u+v &&\mathrm{Commutative} \\ \\ \\ v+\vec{0}&=&v&&\mathrm{Identity} \\ \\ v+(-v)&=&0 &&\mathrm{Inverse} \\ \\ \\ a\times (b\times v)&=&(a\times b)\times v&&\mathrm{Associative} \\ \\ 1\times v&=&v&&\mathrm{Identity} \\ \\ \\ a\times (v+u)&=&a\times v+a\times u&&\mathrm{Distributive} \\ \\ (a+b)\times v&=&a\times v+b\times v&&\mathrm{Distributive} \end{array}
\begin{array}{llllll} \displaystyle (V,+,\times) \,\, \mathrm{is} \,\, \mathrm{Vector \,\, Space} \,\, \mathrm{on} \,\, S \end{array}
詳細は本題から逸れるので
この記事ではあまり詳しく扱いません。
(より詳しくは線型空間の記事で)
線形空間の基本的な性質
この記事で出てくる性質については
厳密な証明で必要になるためまとめておきます。
\begin{array}{ccc} \vec{0} &\in& V \\ \\ 0,1 &\in& S \end{array}
まず「単位元」についてですが
これは「全てのベクトル空間」でこうなります。
( S は体 \mathrm{Field} であるためこうなる)
↑ で紹介した内容は要はそういうことで
(先に記述したのはざっくりとした法則だけ)
\begin{array}{rcr} v,u \in V &\to& v+u \in V \\ \\ v \in V&\to& -v \in V \end{array}
「加法」も「スカラーとの乗法」も
\begin{array}{ccc} c\in S∧v\in V &\to& cv \in V \end{array}
「公理」により
「全て V に含まれる」ことになっています。
( S はだいたい実数全体 R をとります)
線型性 Linearity
「加法」「斉次性」で定義される性質のこと
\begin{array}{ccc} f(ax)&=&af(x) && 斉次性 \\ \\ f(x+y)&=&f(x)+f(y) && 加法性 \\ \\ \\ f(ax+by)&=&af(x)+bf(y) && 線型性 \end{array}
要は「内積」の感覚で
\begin{array}{llllll} \displaystyle ax+by &→&(a,b)(x,y) \\ \\ ax+by+cz &→&(a,b,c)(x,y,z) \end{array}
\begin{array}{cccc} \displaystyle a_0 x^0 + a_1 x^1 + a_2 x^2 + \cdots + a_n x^n &=&0 \\ \\ x_1 p_1 + x_2 p_2 + x_3 p_3 + \cdots + x_np_n &=&E(X) \end{array}
よく見るこの形のことを言っています。
(見た目一直線だから線型)
線型独立 Linearly Independent
|| ベクトルが一直線上に無い感じ
「次元」を増やさないと説明できない状態
\begin{array}{ccc} v_1,v_2,v_3,...,v_n&\in&\mathrm{Vector} \\ \\ c_1,c_2,c_3,...,c_n&\in&\mathrm{Scalar} \end{array}
\begin{array}{ccccc} \displaystyle\sum_{k=1}^{n}c_kv_k=\vec{0} &&→&& c_1=c_2=\cdots=c_n=0 \end{array}
一般的にはこんな感じで
( v_n は零ベクトル \vec{0} ではないとします)
「平面」の話だと
\begin{array}{ccc} -2(0,1)+(0,2)&=&(0,0) \\ \\ -2(1,2)+(2,4)&=&(0,0) \end{array}
\begin{array}{ccccc} c_1(a_1,b_1)+c_2(a_2,b_2)=(0,0) &&→&& c_1=c_2=0 \end{array}
ちょっとややこしいですが
\begin{array}{rcr} (0,1)+(1,0)&=&(1,1) \\ \\ 0(0,1)+0(1,0)&=&0(1,1) \\ \\ c_1(0,1)+c_2(1,0)&=&(c_1,c_2) \end{array}
\begin{array}{ccc} c_1≠0 &→& c_1(0,1)+c_2(1,0)≠(0,0) \\ \\ c_2≠0 &→& c_1(0,1)+c_2(1,0)≠(0,0) \end{array}
こんな感じになります。
線型従属
補足しておくと
\begin{array}{ccc} -2(0,1)+(0,2)&=&(0,0) \\ \\ -2(1,2)+(2,4)&=&(0,0) \end{array}
こういう「線型独立じゃない」
「1直線上」に存在するベクトルたちには
\begin{array}{ccccc} c_i≠0 &∧& \displaystyle\sum_{k=1}^{n}c_kv_k=\vec{0} \end{array}
「線型従属」なんて名前が付いています。
(この場合は次元が n に定まらず定義し辛い)
この辺り少しややこしいですが
1つでも「同一直線上にベクトルがある」場合
\begin{array}{ccc} (0,1),(0,2),(1,0) &&× \\ \\ (0,0,0),(1,0,0) &&× \end{array}
これは「線型従属」になり
「線型独立」にはなりません。
線形包 Liner Span
「スカラーとベクトルの積」と「その和」
\begin{array}{ccc} \mathrm{Span} (B) &=& \displaystyle \left\{ \sum_{n=1}^{N} c_nv_n \,\,\middle| \,\, \begin{array}{ccc} c_1,c_2,...,c_N \in I \\ v_1,v_2,...,v_N\in B \end{array} \right\} \end{array}
「これで表現できる全てのベクトルを集めた集合」のこと
\begin{array}{lcccc} c_1,c_2,... &\in& I &⊂&R \\ \\ v_1,v_2,...&\in&B&⊂&V \end{array}
「和の cv の個数は有限個」に限定されますが
「変数に来るベクトルの集合」の中身は無限個でも良いです。
(無限次元でも和は無限個にならない)
初見だと分かり難いですが
\begin{array}{ccc} c_1v_1+c_2v_2+\cdots+c_Nv_N &\in& \mathrm{Span} (B) \end{array}
これは「直線」「平面」「空間」などの
「全ての点を集める」操作になります。
(一部の材料から全体を得る操作)
線形包の具体的な感覚
これは平面で考えると分かりやすいです。
\begin{array}{ccc} R^2 &=& \{ (x,y) \mid x,y\in R \} \end{array}
例えばこのような平面の中にある
\begin{array}{lcl} v_x &=& (1,0) &\in& R^2 \\ \\ v_y &=& (0,1) &\in& R^2 \\ \\ v_{y=x} &=& (1,1) &\in& R^2 \end{array}
このような「点を意味するベクトル」を考えた時
\begin{array}{lcl} \mathrm{Span}(\{v_x\}) &=& \{ (r,0) \mid r\in R \} && x軸 \\ \\ \mathrm{Span}(\{v_y\}) &=& \{ (0,r) \mid r\in R \} && y軸 \\ \\ \mathrm{Span}(\{v_{y=x}\}) &=& \{ (r,r) \mid r \in R \} && y=xの直線 \\ \\ \mathrm{Span}(\{v_x,v_y\}) &=& \{ (x,y) \mid x,y\in R \} && 平面 \end{array}
この「線形包」が意味する「点の集まり」は
このような形になります。
線形包はベクトル空間の部分集合になる
「ベクトル空間 (V,+,\times) \,\,\mathrm{on} \,\, S 」が定められた時
\begin{array}{ccc} v_1,v_2,...,v_n &\in& V \end{array}
「 V の全てのベクトル」を集めると
(線型従属なベクトルも含む)
\begin{array}{ccc} v&=&1\cdot v \end{array}
自身により自身を表現できるのは明らかですから
\begin{array}{ccc} V &=& \mathrm{Span} (V) \end{array}
その「線形包」は当然このようになります。
(つまり最大の線形包は V の線形包)
部分集合の線形包
ということであれば
「 V の部分集合 V_* 」の「線形包」は
\begin{array}{ccc} \mathrm{Span}(V_*) &⊂& V \end{array}
直感的にはこうなりそうなわけですが
まだこの時点じゃ自明では無いので
\begin{array}{ccc} v\in \mathrm{Span}(V_*) &\to& v\in V \end{array}
線形包 \mathrm{Span}(V_*) の要素を
V が全て持つと言い切るためには
そうなることをきちんと証明する必要があります。
部分集合であることの証明
これは定義から整理していくと
「 V_* は V の部分集合である」という前提より
\begin{array}{ccc} v_1,v_2,...,v_k&\in&V_* &⊂& V \end{array}
これらが全て V の要素でもあることから
(使えるスカラー c も V のものと同じ)
\begin{array}{ccc} c_1v_1+c_2v_2+\cdots+c_kv_k &\in& \mathrm{Span}(V_*) \end{array}
「線形包」の定義より
「 \mathrm{Span}(V_*) の全ての要素」はこうなるので
(このように表現できないベクトルは要素ではない)
\begin{array}{ccc} cv &\in& V \\ \\ v+u &\in& V \end{array}
「ベクトル空間の公理」より
\begin{array}{ccc} c_1v_1+c_2v_2+\cdots+c_kv_k &\in& V \end{array}
これは明らかにこうなると言えます。
(同様の手順で部分空間であることも確かめられる)
基底 Basis
|| 次元の数を決めるもの
「線型独立」な「 V を生成する集合」のこと
\begin{array}{ccccc} (0,1),(0,2) &&→&&\mathrm{Line} \\ \\ (0,1),(1,0) &&→&&\mathrm{Area} \end{array}
\begin{array}{ccccc} \displaystyle\sum_{k=1}^{n}c_kv_k=\vec{0} &&→&& c_1=c_2=\cdots=c_n=0 \end{array}
この時の n が「次元」になります。
\begin{array}{ccc} \{v_1,v_2,v_3,...,v_n\} \end{array}
これについては
「標準基底」を見た方が理解しやすいと思います。
標準基底 Standard Basis
例えば「ベクトル」の「標準基底」は
\begin{array}{ccc} (a,b)&=&a(1,0)+b(0,1) \end{array}
こうやって分解できることから
\begin{array}{ccc} \{ & (1,0) \\ \\ & (0,1) & \} \end{array}
このような形で定義されます。
同様に
3次元の場合
\begin{array}{ccc} (a,b,c)&=&\displaystyle \begin{array}{crc} & a(1,0,0) \\ \\ +&b(0,1,0) \\ \\ +&c(0,0,1) \end{array} \end{array}
「標準基底」は
\begin{array}{ccc} \{ & (1,0,0) \\ \\ & (0,1,0) \\ \\ & (0,0,1) & \} \end{array}
このようになります。
基底と標準基底
「基底」という概念は
この「標準基底」を一般化したもので
「直交(標準基底)」→「向きが違う(基底)」
こんな感じに一般化した結果
\begin{array}{ccccc} \displaystyle\sum_{k=1}^{n}c_kv_k=\vec{0} &&→&& c_1=c_2=\cdots=c_n=0 \end{array}
「線型独立」での定義になっています。
( V を生成するという条件はそのまま)
正規直交基底
補足しておくと
これに追加する形で
以下の条件を満たすものには
\begin{array}{ccc} ||v||&=&1 \end{array}
\begin{array}{ccc} i≠j &→&v_i \cdot v_j=0 \end{array}
「正規直交基底」なんて名前が付いています。
(これの代表例が標準基底・基本ベクトル)
基底の厳密な定義
「基底」という概念は
\begin{array}{ccc} v_1,v_2,...,v_n&\in&V \end{array}
「ベクトル空間 V 」に定義されるもので
\begin{array}{ccc} B&⊂&V \end{array}
いくつかの条件を満たす
「 V の部分集合 B 」として定義されています。
「基底」であるために必要な条件は主に2つ
\begin{array}{ccccc} \displaystyle\sum_{k=1}^{n}c_kv_k=\vec{0} &&→&& c_1=c_2=\cdots=c_n=0 \end{array}
1つが「部分集合 B が線型独立である」こと
そしてもう1つが
\begin{array}{ccc} c_1 v_1+c_2 v_2+\cdots + c_n v_n &=&v&\in&V \end{array}
「 V の全ての要素を線形結合で表せる」ことで
基本的にこの2つの条件さえ満たしていれば
その「 V の部分集合」は「基底」だと言えます。
ちなみに
「 V が有限次元ベクトル空間」の場合には
\begin{array}{ccc} |B|&<&\infty \end{array}
「要素数が有限個である」という条件も付くことがあります。
(これは有限次元の定義により導くことが可能)
まとめると
\begin{array}{ccc} c_1 v_1+c_2 v_2+\cdots + c_n v_n &=&v \end{array}
「ベクトル空間の全ての要素 v 」を表現できる
\begin{array}{ccccc} \displaystyle\sum_{k=1}^{n}c_kv_k=\vec{0} &&→&& c_1=c_2=\cdots=c_n=0 \end{array}
「線型独立」な「 V の部分集合」
\begin{array}{ccc} \{ v_1,v_2,v_3,...,v_n \} \end{array}
これが「基底」の厳密な定義になります。
(線形包の定義に類似しているが別物)
基底の線形包
以上のことから
\begin{array}{lcl} \mathrm{Span}(\{(1,0)\}) &=& \{ (x,0) \mid x\in R \} && x軸 \\ \\ \mathrm{Span}(\{(0,1)\}) &=& \{ (0,y) \mid y\in R \} && y軸 \\ \\ \mathrm{Span}(\{(1,0),(0,1)\}) &=& \{ (x,y) \mid x,y\in R^2 \} && 平面 \end{array}
「標準基底」を見れば分かるように
\begin{array}{lcl} \mathrm{Span}\left(\left\{ \begin{array}{ccc} (1,0) \\ (0,1) \end{array} \right\}\right) &=& \{ (x,y) \mid x,y\in R \} && 平面 \\ \\ \mathrm{Span}\left(\left\{ \begin{array}{ccc} (1,0,0) \\ (0,1,0) \\ (0,0,1) \end{array} \right\}\right) &=& \{ (x,y,z) \mid x,y,z\in R \} && 空間 \end{array}
「基底」の「線形包」は
「ベクトルの個数」と等しい「次元」を持つ
そんな「空間全体の点集合」になることが分かります。
基底は定数と和で標準基底に変換可能
明らかな結論じゃないので詳細は省きますが
(有限次元では成立するが無限次元だと怪しい)
\begin{array}{ccc} 標準基底で表現可能なベクトル && 任意の基底 \\ \\ c_1(1,0)+c_2(0,1) &=& (a_1,b_1)+(a_2,b_2) \end{array}
「任意の基底」は「標準基底」で表現できるので
\begin{array}{lcc} c_1 &=& a_1+a_2 \\ \\ c_2 &=& b_1+b_2 \end{array}
「基底」は「標準基底」に変換して
\begin{array}{ccc} c_1 &=& \displaystyle \sum_{n=1}^{N} c_{1n} \\ \\ c_2 &=& \displaystyle \sum_{n=1}^{N} c_{2n} \\ \\ &\vdots \\ \\ c_N &=& \displaystyle \sum_{n=1}^{N} c_{Nn} \end{array}
直感的には特に問題無いと言えます。
(この時点ではイメージの補強だと思ってください)
線形結合と連立方程式
線形結合の形から分かるように
\begin{array}{ccc} v&=&c_1v_1+c_2v_2+c_3v_3 \end{array}
例えば 3 次元なら
\begin{array}{ccc} \begin{pmatrix} e_1 \\ e_2 \\ e_3 \end{pmatrix} &=& \displaystyle c_1 \begin{pmatrix} v_{11} \\ v_{12} \\ v_{13} \end{pmatrix} + c_2 \begin{pmatrix} v_{21} \\ v_{22} \\ v_{23} \end{pmatrix} + c_3 \begin{pmatrix} v_{31} \\ v_{32} \\ v_{33} \end{pmatrix} \end{array}
「 3 元一次連立方程式」を使えば
\begin{array}{ccc} \left\{ \begin{array}{lcl} c_1v_{11} + c_2v_{21} + c_3v_{31} &=& e_1 \\ c_1v_{12} + c_2v_{22} + c_3v_{32} &=& e_2 \\ c_1v_{13} + c_2v_{23} + c_3v_{33} &=& e_3 \end{array} \right. \end{array}
「任意のベクトル」に対応する
「スカラー定数」を求めることができます。
( v と v_n の中身が分かってるとする)
そしてこれは
\begin{array}{ccc} \begin{pmatrix} e_1 \\ e_2 \\ e_3 \end{pmatrix} &=& \displaystyle c^*_1 \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} + c^*_2 \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix} + c^*_3 \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix} \end{array}
結局こういう形に落ち着くので
「標準基底」の話になるんですが
\begin{array}{ccc} \begin{pmatrix} e_1 \\ e_2 \\ e_3 \end{pmatrix} &=& \displaystyle c_1 \begin{pmatrix} v_{11} \\ v_{12} \\ v_{13} \end{pmatrix} + c_2 \begin{pmatrix} v_{21} \\ v_{22} \\ v_{23} \end{pmatrix} + c_3 \begin{pmatrix} v_{31} \\ v_{32} \\ v_{33} \end{pmatrix} \end{array}
これが必ず標準基底に変換できる保証は
この時点では「連立方程式の解き方」しかないので
\begin{array}{lcc} c_1 &=& \displaystyle \frac{e_{1}( v_{22}v_{33} - v_{32}v_{23})+v_{21}(e_{2}v_{33} - v_{32}e_{3}) + v_{31} (e_{2}v_{33} - v_{32}e_{3})}{v_{11}( v_{22}v_{33} - v_{32}v_{23})+v_{21}(v_{12}v_{33} - v_{32}v_{13}) + v_{31} (v_{12}v_{23} - v_{22}v_{13})} \\ \\ c_2 &=& \displaystyle \frac{v_{11}( e_{2}v_{33} - v_{32}e_{3})+e_{1}(v_{12}v_{33} - v_{32}v_{13}) + v_{31} (v_{12}e_{3} - e_{2}v_{13})}{v_{11}( v_{22}v_{33} - v_{32}v_{23})+v_{21}(v_{12}v_{33} - v_{32}v_{13}) + v_{31} (v_{12}v_{23} - v_{22}v_{13})} \\ \\ c_3 &=& \displaystyle \frac{v_{11}( v_{22}e_{3} - e_{2}v_{23})+v_{21}(v_{12}e_{3} - e_{2}v_{13}) + e_{1} (v_{12}v_{23} - v_{22}v_{13})}{v_{11}( v_{22}v_{33} - v_{32}v_{23})+v_{21}(v_{12}v_{33} - v_{32}v_{13}) + v_{31} (v_{12}v_{23} - v_{22}v_{13})} \end{array}
証明の形はぐっちゃぐちゃになります。
(これでも \mathrm{det}≠0 のパターンなので全部ではない)
これを見てわかる通り
「連立方程式」についてはちょっと長くなるので
これの詳細は別の記事で扱うことにします。
基底の存在定理
「全てのベクトル空間」には
「必ず基底が存在する」
\begin{array}{ccc} V &=& \mathrm{Span} (\{ v_1,v_2,...,v_n \}) \end{array}
これが「存在定理」の主張で
(基底は線形独立で V の中身を全て表現可能)
\begin{array}{ccc} c_1 v_1+c_2 v_2+\cdots + c_n v_n &=&v \end{array}
これが正しいから
「ベクトル空間の存在」を保証すれば
それと同時に「基底の存在」もまた保証されます。
前提の確認
これを証明するにあたり必要になる
\begin{array}{cccccc} \displaystyle v,u,w&∈&V &&V \,\, \mathrm{is} \,\, \mathrm{Set \,\, of \,\, Vector} \\ \\ a,b&∈&S &&S \,\, \mathrm{is} \,\, \mathrm{Scalar \,\, Field} \end{array}
\begin{array}{cccccccc} \displaystyle (v+u)+w&=&v+(u+w) &&\mathrm{Associative} \\ \\ v+u&=&u+v &&\mathrm{Commutative} \\ \\ \\ v+\vec{0}&=&v&&\mathrm{Identity} \\ \\ v+(-v)&=&0 &&\mathrm{Inverse} \\ \\ \\ a\times (b\times v)&=&(a\times b)\times v&&\mathrm{Associative} \\ \\ 1\times v&=&v&&\mathrm{Identity} \\ \\ \\ a\times (v+u)&=&a\times v+a\times u&&\mathrm{Distributive} \\ \\ (a+b)\times v&=&a\times v+b\times v&&\mathrm{Distributive} \end{array}
\begin{array}{l} \displaystyle (V,+,\times) \,\, \mathrm{is} \,\, \mathrm{Vector \,\, Space} \,\, \mathrm{on} \,\, S \end{array}
「ベクトル空間 (V,+,\times) 」について
まずざっと確認しておくと
この存在が保証される場合
\begin{array}{cccccc} \displaystyle v,u,w&∈&V &&V \,\, \mathrm{is} \,\, \mathrm{Set \,\, of \,\, Vector} \\ \\ a,b&∈&S &&S \,\, \mathrm{is} \,\, \mathrm{Scalar \,\, Field} \end{array}
まず「スカラー」と「ベクトル」の存在が保証されます。
( V,S に含まれる数の個数はなんでもいい)
より具体的には
\begin{array}{ccc} \vec{0},v_1,v_2,...,v_n &\in& V \\ \\ 0,1,c &\in& S \end{array}
この中にある「全ての要素」の存在が保証されるので
( V の中身はだいたい無限個のベクトル)
この事実を表す表現として
\begin{array}{ccc} V &=& \mathrm{Span} (\{ v_1,v_2,...,v_n \}) \end{array}
「有限個のベクトルで表現可能」という形で
「有限次元」の V は定義されています。
(この時点で基底に対する言及は特に無い)
ベクトル空間と例外
まず最も小さな話として
\begin{array}{ccc} V&=&\{ \vec{0} \} \end{array}
「 0 次元」の場合は
(ベクトル空間はこれ以上小さく成り得ない)
\begin{array}{ccc} \mathrm{Span}(\{\}) &=& \{ \vec{0} \} \end{array}
「基底」を「空集合」と解釈し
「線形独立である」と定義することで例外とします。
(これは1点の話であり線型従属の定義も満たす)
これはベクトル v_* を1つ考えた時
\begin{array}{ccc} \mathrm{Span}(\{ v_* \}) &\to& 直線 \end{array}
基礎になる部分であるにもかかわらず
同様の生成手順では解釈し辛いからで
それ以上の意味は特にありません。
有限次元ベクトル空間では
以上が前提となることから
\begin{array}{ccc} \vec{0},v_1,v_2,...,v_n &\in& V \\ \\ 0,1,c &\in& S \end{array}
まずこの存在が保証されて
(任意の有限次元ベクトル空間が存在するため)
この存在により
\begin{array}{ccc} v_0 &=& \vec{0} \end{array}
このパターン以外もまた保証されます。
( V=\{ \vec{0} \} の場合は分かっている)
ちなみに「有限次元ベクトル」というのは
\begin{array}{lcl} v_{\mathrm{Area}} &=& (x,y) \\ \\ v_{\mathrm{Space}} &=& (x,y,z) \\ \\ v_{\mathrm{limited}} &=& (x_1,x_2,...,x_n) \end{array}
具体的にはこういうやつです。
これに対し
\begin{array}{ccc} v_{\mathrm{unlimited}} &=& (x_1,x_2,...,x_n,x_{n+1},...) \end{array}
「無限次元ベクトル」はこんな感じになります。
(こちらは構成法が特殊なので後回し)
直線では
V はベクトルを持ち
V≠\{ \vec{0} \} であるとすると
\begin{array}{ccc} v_1&≠& \vec{0} \end{array}
ベクトル空間の存在を保証すれば
\begin{array}{ccc} v_1 &\in & V \end{array}
まずこうなることは明らかだと言えます。
(この時点で V は -v_1 と cv_1 を持つ)
とすると
\begin{array}{ccc} cv_1 = \vec{0} &&\to&& c=0 \end{array}
\{v_1\} は明らかに「線形独立」ですから
( 0 ベクトルでは無いので)
\begin{array}{ccc} \{v_1\} &\mathrm{is}& \mathrm{Basis} \end{array}
これは V が直線の場合に限れば
明らかに「基底」の定義を満たすと言えます。
(線形結合の定義については cv_1 の形より明らかとする)
平面や空間なら
V が「直線」であれば
↑ の時点で定理は示されたと言えますが
\begin{array}{lcl} V_{\mathrm{Line}} &=& \mathrm{Span} (\{ (1,0) \}) \\ \\ V_{\mathrm{Area}} &=& \mathrm{Span} (\{ (1,0),(0,1) \}) \\ \\ V &=& \mathrm{Span} (\{ v_1,v_2,...,v_n \}) \end{array}
「平面」や「空間」の点になると
\begin{array}{lcl} V_{\mathrm{Line}} &=& \mathrm{Span} (\{ (1,1) \}) \\ \\ V_{\mathrm{Line}} &=& \mathrm{Span} (\{ (1,1),(2,2) \}) \\ \\ V_{\mathrm{Area}} &=& \mathrm{Span} (\{ (1,1) ,(0,1) \}) \end{array}
1つのベクトルでは
全て表現できるとは限らないため
(直線に無い点を平面から見つければこれは明らか)
\begin{array}{lcl} V &=& \mathrm{Span} (\{ v_1,v_2\}) \\ \\ &≠& \mathrm{Span} (\{ v_1\}) && v_2≠cv_1 \end{array}
「1つの線形独立なベクトルが必ず基底になる」
これは保証された事実だとは言えません。
「直線」以外の「基底」を得るためには
\begin{array}{ccc} V &=& \mathrm{Span} (\{ v_1,v_2,...,v_n \}) \end{array}
必ずこれを満たす必要があって
そのためには「複数のベクトル」が必要になります。
線形包とそれ以外のベクトルの存在
↑ を厳密に説明するために
まず事実確認をしておくと
\begin{array}{ccc} v&=&c_1v_1+c_2v_2+\cdots+c_nv_n \end{array}
例えば「 V の中にある全てのベクトル」を使えば
(平面なら平面上の全ての点)
\begin{array}{ccc} V&=&\mathrm{Span} (V) \end{array}
「 V の要素を全て得られる」というのは明らかです。
(全てのベクトルは自身 v=1\cdot v で表現できる)
ということは
「 V の部分集合」を適当に選んだ時
\begin{array}{ccc} V&=&\mathrm{Span} (\{ v_1,v_2,...,v_k \}) \end{array}
「全て線形独立」とは限らない
「基底」を含むこの形ではなく
(これと ↓ で全てのパターンをカバーできる)
\begin{array}{ccc} V&≠&\mathrm{Span} (\{ v_1,v_2,...,v_k \}) \end{array}
このようになるとした場合
(少なくとも全てのベクトルではない)
\begin{array}{ccc} V\setminus\mathrm{Span} (\{ v_1,v_2,...,v_k \})&≠&∅ \end{array}
これは確実にこうなると言えます。
(線型従属ではないベクトルの存在が直感的に明らか)
というのも
\begin{array}{ccc} V&≠&\mathrm{Span} (\{ v_1,v_2,...,v_k \}) \end{array}
これを前提として
\begin{array}{ccc} V\setminus\mathrm{Span} (\{ v_1,v_2,...,v_k \})&\textcolor{pink}{=}&∅ \end{array}
これが「空集合である」と仮定した場合
(不足しているベクトルが無い)
\begin{array}{ccc} V&⊂&\mathrm{Span} (\{ v_1,v_2,...,v_k \}) \end{array}
V と \mathrm{Span} (\{ v_1,v_2,...,v_k \}) の関係は
このようになると言えるので
\begin{array}{ccc} \{ v_1,v_2,...,v_k \}&⊂&V \\ \\ \mathrm{Span}(\{ v_1,v_2,...,v_k \})&⊂&V \end{array}
「線形包」は V の部分集合であることから
( ↑ で確認したように線形包の定義より明らか)
\begin{array}{ccc} V&=&\mathrm{Span} (\{ v_1,v_2,...,v_k \}) \end{array}
結果、この2つの集合の関係はこうなります。
(お互いがお互いの部分集合なので)
以上より
\begin{array}{ccc} V&≠&\mathrm{Span} (\{ v_1,v_2,...,v_k \}) \end{array}
これを前提とすると
\begin{array}{ccc} V\setminus\mathrm{Span} (\{ v_1,v_2,...,v_k \})&\textcolor{pink}{=}&∅ \end{array}
この仮定から矛盾が得られるので
以下のような「線形包」からは
\begin{array}{ccc} V&≠&\mathrm{Span} (\{ v_1,v_2,...,v_k \}) \end{array}
これを補う要素として
\begin{array}{ccc} V\setminus\mathrm{Span} (\{ v_1,v_2,...,v_k \})&≠&∅ \end{array}
「不足しているベクトルの存在」を導くことができます。
(これが線形独立かどうかはこの時点ではまだ不明)
線形独立なベクトルを選べる
まず確認しておくと
\begin{array}{ccc} V&=&\mathrm{Span} \left( \left\{ \begin{array}{ccc} (1,0,0) \\ (0,1,0) \\ (0,0,1) \end{array} \right\} \right) \end{array}
私たちの直感は
「線形独立であるベクトル」を選択し
\begin{array}{ccc} \mathrm{Basis}_{D=3} &=& \left\{ \begin{array}{ccc} (1,0,0) \\ (0,1,0) \\ (0,0,1) \end{array} \right\} \end{array}
「基底」を容易に構築できます。
(標準基底を考えると明らか)
しかしよくよく考えてみると
この具体的な方法は不明瞭です。
\begin{array}{ccc} \{(1,0,0)\} \end{array}
まずここから始まることは分かって
(これが線形独立になるのは確認済み)
\begin{array}{ccc} \left\{ \begin{array}{ccc} (1,0,0) \\ (0,1,0) \end{array} \right\} \end{array}
次にこれを選ぶという結果は分かるんですが
\begin{array}{ccc} \{(1,0,0)\} &&\to&& \left\{ \begin{array}{ccc} (1,0,0) \\ (0,1,0) \end{array} \right\} \end{array}
特にこの辺り
自分が何をしてるのかうまく説明できません。
(どうやってか線形独立なベクトルを選んでる)
線型従属とそれ以外
事実確認をしておくと
\begin{array}{ccc} r(1,0,0) &≠& (0,1,0) \end{array}
これが定数倍で表現できないから
\begin{array}{ccc} c_1(1,0,0)+c_2(0,1,0)=\vec{0} \\ \\ ↓ \\ \\ c_1=c_2=0 \end{array}
これが「線形独立になる」というのは
ベクトルの選出理由としては非常に分かり易いです。
これを無意識に確認した上で
\begin{array}{ccc} r(1,0,0) ≠ (0,1,0) &&\to&& \left\{ \begin{array}{ccc} (1,0,0) \\ (0,1,0) \end{array} \right\} \end{array}
これを選んだというのは
本当にそうかはさておき
しっくりくるプロセスだと言えます。
線形従属と線形包
実際、ベクトルを選ぶ際には
\begin{array}{l} V \setminus \{ (x,0,0) \mid x\in R \} \\ \\ V \setminus \mathrm{Span}(\{ (1,0,0) \}) \end{array}
「線型従属なベクトル」を
「全体 V から全て除外」した上で
\begin{array}{ccl} (0,1,0) &\in& V \setminus \mathrm{Span}(\{ (1,0,0) \}) \\ \\ (0,0,1) &\in& V \setminus \mathrm{Span}(\{ (1,0,0),(0,1,0) \}) \end{array}
その中から選んでいるため
(空間以降は線型従属じゃなく線形包)
\begin{array}{lcl} v_2&\in&V\setminus \mathrm{Span}(\{ v_1 \}) \\ \\ v_3&\in&V\setminus \mathrm{Span}(\{ v_1,v_2 \}) \end{array}
ベクトルの選び方として
この手順は有効な方法の1つだと言えます。
線形独立になるはず
↑ の仮説を確認するために
以下の手順でベクトルを追加してみると
(ベクトルが1つなら線形独立であることは確認済み)
\begin{array}{ccc} v_2&\in&V\setminus \mathrm{Span}(\{ v_1 \}) \end{array}
↓ の「ベクトルの集合」は
\begin{array}{ccc} \{ v_1,v_2 \} &⊂& V \end{array}
結論から言ってしまうと
間違いなく「線形独立」になります。
というのも
これが「線形独立ではない」と仮定した場合
\begin{array}{lcc} c_1v_1 &=& v_2 \\ \\ c_1v_1+c_2v_2 &=& \vec{0} \end{array}
これは「線形従属である」ということになりますから
(これは仮定を前提とした事実)
\begin{array}{ccc} c_1≠0 &\mathrm{or}& c_2≠0 \end{array}
まずどちらかの係数 c が 0 ではないと分かるので
c_2 を場合分けして計算してみると
\begin{array}{ccr} \displaystyle v_2 &=& \displaystyle \frac{-c_1}{c_2}v_1 && c_2≠0 \\ \\ \vec{0} &=& \displaystyle c_1v_1 && c_2=0 && 線形独立 \end{array}
c_2 が 0 ではないことが分かります。
(これは線形従属という仮定の元での結果)
となると
\begin{array}{ccc} v_2 &=& \displaystyle \frac{-c_1}{c_2}v_1 && c_2≠0 \end{array}
これはこうなるはずなんですが
\begin{array}{ccc} \displaystyle \frac{-c_1}{c_2}v_1 &\in& \mathrm{Span}(\{v_1\}) \end{array}
これは「線形包」に含まれる要素なので
(線形包の定義より v_1 の定数倍を含む)
\begin{array}{ccc} v_2&\in&V\setminus \mathrm{Span}(\{ v_1 \}) \end{array}
この前提に矛盾してしまいます。
まとめると
\begin{array}{ccc} c_1v_1+c_2v_2 &=& \vec{0} \end{array}
「線型従属である」という仮定の元では
c_1,c_2 のどちらかは 0 ではないことから
\begin{array}{ccc} c_2=0 && c_1v_1=\vec{0} && 線型独立 \\ \\ c_2≠0 && \displaystyle v_2=\frac{-c_1}{c_2}v_1 && v_2 \in \mathrm{Span}(\{v_1\}) \end{array}
「 c_2 は存在しない」と言えるので
「線型従属である」が誤りであることが分かり
(線型従属となる c_2 が存在しない)
この事実から
\begin{array}{ccc} v_2&\in&V\setminus \mathrm{Span}(\{ v_1 \}) \end{array}
これを前提とすると
\{ v_1,v_2 \}
これが「線形独立になる」という結論が得られます。
( c_2=0 はとれるが線型従属ではない)
空間やそれ以上でも同様
\{ v_1,v_2 \} を「線形独立にできる」ことは分かったので
\begin{array}{ccc} c_1v_1+c_2v_2 = \vec{0} \\ \\ ↓ \\ \\ c_1=c_2=0 \end{array}
\{ v_1,v_2 \} を「線形独立」とした上で
\begin{array}{ccc} v_3 &\in& V\setminus \mathrm{Span}(\{ v_1,v_2 \}) \end{array}
今度はこれを前提にしてみると
さっきと同様の手順で計算したら
\begin{array}{ccc} c_3=0 && c_1v_1+c_2v_2=\vec{0} && 線型独立 \\ \\ c_3≠0 && \displaystyle v_3=\frac{-c_1}{c_3}v_1+\frac{-c_2}{c_3}v_2 && v_3 \in \mathrm{Span}(\{v_1\}) \end{array}
こうなるため
前提として
\begin{array}{ccc} v_3 &\in& V\setminus \mathrm{Span}(\{ v_1,v_2 \}) \end{array}
このようにとると
\{ v_1,v_2,v_3 \}
これもまた「線形独立」になると言えます。
(同様の手順でいくらでも大きくできる)
線形包と線形独立
以上より
「線形包」と「線形独立」の振る舞いから
\begin{array}{ccc} v_{n+1}&\in&V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_n \}) \end{array}
この形での追加なら
(線形独立な \{ v_1,v_2,...,v_n \} に対して)
\{ v_1,v_2,...,v_n,v_{n+1} \}
これが「線形独立になる」ことはほぼ確実なので
↓ が「線形独立」だと仮定した上で
(数学的帰納法の合っていて欲しい仮説)
\begin{array}{ccc} \{ v_1,v_2,...,v_n \} \end{array}
これを示すために
\begin{array}{ccc} \{ v_1,v_2,...,v_n,v_{n+1} \} \end{array}
これが「線形独立にならない」と仮定してみると
(こっちは合っていて欲しくない仮定)
平面や空間の話と同様の手順を経れば
\begin{array}{ccc} c_{n+1}=0 && c_1v_1+\cdots+c_nv_n=\vec{0} && 線型独立 \\ \\ c_{n+1}≠0 && \displaystyle v_{n+1}=\frac{-c_1}{c_{n+1}}v_1+\cdots+\frac{-c_n}{c_{n+1}}v_n && v_{n+1} \in \mathrm{Span}(\{v_1,...,v_n\}) \end{array}
この結果が得られますから
明らかに「線型従属ではない」
ということは
\{ v_1,v_2,...,v_n \}
これが「線形独立」であり
\begin{array}{ccc} v_{n+1}&\in&V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_n \}) \end{array}
こうなるとすると
\{ v_1,v_2,...,v_n,v_{n+1} \}
これは「線形独立である」と言えます。
(これにより数学的帰納法の要件が満たされる)
有限次元ベクトル空間の定義と操作の回数
感覚的にも分かる通り
\begin{array}{ccc} v_{n+1}&\in&V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_n \}) \end{array}
この一連の操作には
\begin{array}{ccc} V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_N \}) &=& ∅ \end{array}
「いつか」終わりが来ます。
「有限」である以上これは直感的に明らかです。
(終わらないと線形独立な無限個の集合ができてしまう)
しかし
これがどのような定義により保証されているのか
\begin{array}{ccc} V &=& \mathrm{Span}(\{ v_1,v_2,...,v_N \}) \end{array}
この時点では曖昧ですよね。
(あくまで直感的に明らかな結論)
結論としては
「 V の任意の線形独立な部分集合」に対し
\begin{array}{ccc} \Bigl| \{ v_1,v_2,...,v_N \} \Bigr| &<& \infty \end{array}
「その要素数は有限個である」
という定義がこれを保証するんですが
これは知らないと納得できない部分だと思います。
実際、これを知らない状態だと
\begin{array}{ccc} \{ v_1,v_2,...,v_n,v_{n+1},... \} \end{array}
「無限回の操作」を許す
そんな仮定によって発生するこの集合が
\begin{array}{ccc} \Bigl| \{ v_1,v_2,...,v_n,v_{n+1},... \} \Bigr| &=& \infty \end{array}
「定義に矛盾する」という結論を導くことができません。
(有限回で操作が終わらなければ定義に矛盾する)
有限次元の同値な定義
「線形独立な部分集合の要素数は有限」
これは「有限次元ベクトル空間」の定義なんですが
\begin{array}{ccc} \Bigl| \{ v_1,v_2,...,v_N \} \Bigr| &<& \infty \end{array}
「有限次元ベクトル空間」の定義としては
\begin{array}{ccc} R^3 &=& \displaystyle \mathrm{Span}\left(\left\{ \begin{array}{ccc} (1,0,0) \\ (0,1,0) \\ (0,0,1) \end{array} \right\}\right) \end{array}
「 V を生成できる有限集合が存在する」
こちらの定義の方がしっくり来ると思います。
(中身が有限個の基底が存在するって話なので)
結論としては
この2つの命題は同値なので
どちらかを定義とすればもう片方も正しくなるんですが
\begin{array}{ccc} V=\mathrm{Span}(B) \\ \\ |B|<\infty \end{array}
感覚的にはちょっと遠い感じがするので
同値であることを念のため確認しておこうと思います。
それぞれの定義と論理式
簡単に確認しておくと
まず「有限個のベクトルで表現できる」
\begin{array}{ccc} \exists V_* ⊂ V & \Bigl( V_* \,\, \mathrm{is} \,\, \mathrm{Finite} \Bigr) ∧ \Bigl( V=\mathrm{Span}(V_*) \Bigr) \end{array}
\begin{array}{lcc} V_* \,\, \mathrm{is} \,\, \mathrm{Finite} && \equiv && \exists n\in N \,\, \mathrm{Cardinal}(V_*)=n \end{array}
これの論理式はこんな感じになっています。
(存在が宣言されてるので有限値 n が使える)
「線形独立な部分集合」は
「全て有限集合である」
\begin{array}{ccc} \forall V_*⊂V & \left( \Bigl( V_* \,\, \mathrm{is} \,\, \mathrm{Independent} \Bigr) ⇒ \Bigl( V_* \,\, \mathrm{is} \,\, \mathrm{Finite} \Bigr) \right) \end{array}
こちらの方はこんな感じ。
(自然数の部分集合に上限があれば最大元が存在する)
\begin{array}{ccc} v_1,v_2,...,v_n &\in& V_* \\ \\ c_1,c_2,...,c_n &\in & R_* \end{array}
\begin{array}{ccc} V_* \,\, \mathrm{is} \,\, \mathrm{Independent} \\ \\ \displaystyle \forall c_1,...,c_n \,\, \left( \Bigl( c_1v_1+\cdots+c_nv_n=\vec{0} \Bigr) ⇒\Bigl( c_1=0 ∧ \cdots ∧ c_n=0 \Bigr) \right) \end{array}
「線形独立」については少し複雑ですが
( V_* の中身のベクトルは固定されてます)
\begin{array}{ccc} V_* \,\, \mathrm{is} \,\, \mathrm{Finite} \end{array}
これは感覚的に明らかなので
特にひっかかる部分は無いと思います。
存在 ⇒ 有限
まず以下の集合 V_* の存在を前提として
(有限個のベクトルで V を生成できる)
\begin{array}{ccc} V&=&\mathrm{Span}(V_*) \end{array}
「線形独立な部分集合の要素数は有限である」
これを示してみます。
やることはいつものように「背理法」です。
(無限個のベクトルが線形独立になるはずがない)
\begin{array}{ccc} \{u_1,u_2,u_3,...,u_k,u_{k+1},...\} \end{array}
「線形独立な無限集合が存在する」と仮定して
これが前提に矛盾することを示します。
手順は少し複雑です。
\begin{array}{ccc} V&=&\mathrm{Span}(V_*) \end{array}
まず事実確認からしておくと
「有限個のベクトルで表現できる」ということは
\begin{array}{ccc} V_*&=& \{ v_1,v_2,v_3,...,v_N\} \end{array}
「仮定された有限個のベクトルの個数」が
「有限値 N として存在する」ということで
(最大元の存在については長くなるので別記事で)
それだけではなく
\begin{array}{ccc} u &=& c_1v_1+c_2v_2+c_3v_3+\cdots+c_Nv_N \end{array}
「 V 内の任意のベクトル」は
全て線形結合により表現できるということでもあります。
( N 個のベクトルの有限和で)
ここから
\begin{array}{ccc} u &=& c_1v_1+c_2v_2+c_3v_3+\cdots+c_Nv_N \end{array}
「線形結合」を用いれば
\begin{array}{ccc} \{u_1,u_2,u_3,...,u_k,u_{k+1},...\} \end{array}
この無限集合と V の対応はとれそうであることから
(無限個のベクトルは線形独立になり得るのか考えられる)
とりあえず
\begin{array}{ccc} u_1 &=& c_1v_1+c_2v_2+c_3v_3+\cdots+c_Nv_N \end{array}
まずはこのような形を考えてみます。
(ここまでは事実から自然に分かること)
基底の要素数と無限集合
直感的な話として
\begin{array}{ccc} R^3 &=& \displaystyle \mathrm{Span}\left(\left\{ \begin{array}{ccc} (1,0,0) \\ (0,1,0) \\ (0,0,1) \end{array} \right\}\right) \end{array}
例えば「 3 次元」なら
「 3 つ以上のベクトル」を用意してみると
\begin{array}{ccc} (a,b,c)&=& \begin{array}{crc} & a(1,0,0) \\ \\ + & b(0,1,0) \\ \\ + & c(0,0,1) \end{array} \end{array}
このようになることから
他の全てのベクトルは「線型従属」になると言えます。
(差が \vec{0} になる時に a,b,c が 0 である必要が無い)
この事実を踏まえると
\begin{array}{ccc} V_*&=& \{ v_1,v_2,v_3,...,v_N\} \end{array}
「 N 個のベクトルで全て表現可能」なら
(基底はそれ以下の有限個になるはず)
\begin{array}{ccc} \{u_1,u_2,u_3,...,u_N,u_{N+1},...\} \end{array}
「線形独立」な「 N+1 個目のベクトル」は
「線型従属になる」と予想できるため
「無限集合が V を生成する」なら
(これはまだ可能かどうか不明)
\begin{array}{ccc} V&=& \mathrm{Span}(\{u_1,u_2,u_3,...,u_N,u_{N+1},...\}) &&? \end{array}
これは「線型従属」になるはずですから
(直感的には明らかな予想)
そうなれば
\begin{array}{ccc} \{u_1,u_2,u_3,...,u_N,u_{N+1},...\} \end{array}
この「無限集合が線形独立である」という仮定は
結果的に矛盾することになります。
V を生成するとしたまま無限集合へ
以上のことから
\begin{array}{ccc} V&=& \mathrm{Span}(\{u_1,u_2,u_3,...,u_N,u_{N+1},...\}) \end{array}
これさえ得ることが出来れば
仮定が矛盾すると示せるので
\begin{array}{lcl} V&=&\mathrm{Span}(V_*) \\ \\ V&=&\mathrm{Span}(\{ v_1,v_2,v_3,...,v_N\}) \end{array}
定義である前提と
\{u_1,u_2,u_3,...,u_N,u_{N+1},...\}
これが「線形独立である」という「仮定」を利用して
(この仮定は間違っていて欲しい仮定)
\begin{array}{ccc} v_1 & v_2 &\cdots & v_N \\ \\ ↓ & ↓ & {} & ↓ \\ \\ u_1 &u_2&\cdots & u_N \end{array}
とりあえずこのような形を目指してみます。
( V_* が V を生成できることから)
具体的な方法としては
\begin{array}{ccc} (0,0,0)&=& c_0(0,0,0)+c_1(1,0,0)+c_2(0,1,0) \end{array}
「線形独立である」以上
「ベクトル u_n 」は \vec{0} ベクトルではありませんから
( c_0 がなんであれ \vec{0} になることより)
\begin{array}{ccc} u_n &=& c_1v_1+c_2v_2+c_3v_3+\cdots+c_Nv_N \end{array}
いずれかの c_n は 0 ではないので
\begin{array}{ccc} \displaystyle \frac{u_n}{c_k} &=& \displaystyle \frac{c_1v_1}{c_k}+\frac{c_2v_2}{c_k}+\cdots+\frac{c_kv_k}{c_k}+\cdots+\frac{c_Nv_N}{c_k} \end{array}
0 ではない c_k を使ってこのようにすれば
\begin{array}{ccc} v_k &=& \displaystyle \frac{u_n}{c_k} - \left( \frac{c_1v_1}{c_k}+\frac{c_2v_2}{c_k}+\cdots+\frac{c_Nv_N}{c_k} \right) \end{array}
v_k は他の v_i と u_n で表現可能である。
この事実を利用します。
というのも
以上の関係より
\begin{array}{ccc} v_k &\in & \mathrm{Span} ( \{ v_1,v_2,...,v_N, u_n \} ) \end{array}
これは明らかですから
\begin{array}{lcl} v &=& c_1v_1 + \cdots + c_kv_k +\cdots + c_Nv_N \\ \\ v_k&=& c_1^*v_1+ \cdots +c_k^*u_n+ \cdots + c_N^*v_N \end{array}
v_k と u_n を入れ替えた集合は
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ v_1,v_2,..., u_n,...,v_N \} ) \end{array}
「 V を生成できる集合」になると言えるので
( v_k に u_n が入った線形結合を代入すれば確認できる)
\begin{array}{ccc} v_1 & v_2 &\cdots & v_N \\ \\ ↓ & ↓ & {} & ↓ \\ \\ u_1 &u_2&\cdots & u_N \end{array}
後はこれを繰り返すことで
v_k と u_n を入れ替えることができます。
集合の並びに制限は無い
ただ ↑ のままだと
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ v_1,v_2,..., \textcolor{pink}{v_k},...,v_N \} ) \\ \\ V &=& \mathrm{Span} ( \{ v_1,v_2,..., \textcolor{skyblue}{u_n},...,v_N \} ) \end{array}
どの v_k と u_n が交換されるか分からないので
\begin{array}{ccc} V&=& \mathrm{Span}(\{u_1,u_2,u_3,...,u_N,u_{N+1},...\}) \end{array}
この形をうまく作ることができません。
欲しい形に寄せるためには
\begin{array}{ccc} v_k &\to& u_n \\ \\ v_1 &\to& u_1 \end{array}
これらの添え字を合わせる必要があります。
これについては
\begin{array}{ccc} u_1&=& c_1^*v_1+ \cdots +c_k^*v_k+ \cdots + c_N^*v_N && c_k≠0 \\ \\ u_1 &=& c_1v_1 + \cdots + c_kv_k +\cdots + c_Nv_N && c_1≠0 \end{array}
ちょっと難しい気もしますが
実はよくよく考えてみると単純で
というのも
そもそも順番については
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ v_1,v_2,..., u_n,...,v_N \} ) \end{array}
少なくともこの前提では特に制限がありません。
\begin{array}{ccc} (1,0,0) & (0,0,1) & (0,1,0) \\ \\ v^*_1 & v_2^* & v_3^* \\ \\ v_1 & v_3 & v_2 \end{array}
実際、これは数字の列をそのまま表現してるだけなので
並び替えて添え字を変えても中身は同じです。
なので
\begin{array}{ccc} \displaystyle \frac{u_1}{c_1} &=& \displaystyle v_1+\frac{c_2}{c_1}v_2+\frac{c_3}{c_1}v_3+\cdots+\frac{c_N}{c_1}v_N \end{array}
c_k≠0 になる要素を
ただ 1 番目に持ってくるだけで
\begin{array}{ccc} v_1&=& \displaystyle \frac{u_1}{c_1} - \frac{c_2}{c_1}v_2-\frac{c_3}{c_1}v_3-\cdots -\frac{c_N}{c_1}v_N \end{array}
添え字は揃えることができるので
\begin{array}{ccc} u_1&=& c_1^*v_1+ \cdots +c_k^*v_k+ \cdots + c_N^*v_N && c_k≠0 \\ \\ u_1 &=& c_1v_1 + \cdots + c_kv_k +\cdots + c_Nv_N && c_1≠0 \end{array}
特になにをするでもなく
添え字は揃えることができてしまいます。
(やることはただ記号を変更するだけ)
最初だけではない
これは 1 番目に限った話ではなく
\begin{array}{ccc} u_2 &=& c_1u_1 + c_2v_2 +\cdots + c_Nv_N && c_2≠0 \end{array}
2 番目以降も同様なので
\begin{array}{ccl} V &=& \mathrm{Span} ( \{ u_1,v_2,...,v_N \} ) \\ \\ V &=& \mathrm{Span} ( \{ u_1,u_2,...,v_N \} ) \end{array}
同じような手順を辿れば
こんな形の集合もまた作ることができます。
確認しておくと
\begin{array}{ccc} \{ u_1,u_2,u_3,...,u_n,u_{n+1},... \} \end{array}
「仮定」より
これは「線形独立」なので
\begin{array}{ccc} \{ u_1,u_2,u_3,...,u_n \} \end{array}
この部分集合もまた「線形独立」になります。
(和が \vec{0} になるためには定数が全て 0 )
言い換えると
\begin{array}{lclcl} u_2 &≠& c_1u_1 && c_1≠0 \\ \\ u_3&≠& c_1u_1+c_2u_2 && c_1≠0 ∨c_2≠0 \end{array}
こうなるということなので
\begin{array}{ccc} u_2 &=& c_1^*u_1 + c_2^*v_2 +\cdots + c_N^*v_N \end{array}
この形を考えた時
\begin{array}{ccc} u_2 &=& c_1^*u_1 \end{array}
「線形独立」という条件ではこうならない以上
(先述したように u_2 は \vec{0} ではない)
\begin{array}{ccc} c^*_2 &=& \cdots &=& c_N^* &=& 0 \end{array}
こうはならないので
\begin{array}{ccc} v_2&=& \displaystyle -\frac{c_1}{c_2}u_1 + \frac{1}{c_2}u_2-\frac{c_3}{c_2}v_3 - \cdots - \frac{c_N}{c_2}v_N \end{array}
定数 c_2≠0 とできることから
( c^*_k≠0 となる k が存在する)
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ u_1,u_2,...,v_N \} ) \end{array}
これもまたこうなると言えます。
これ以上の場合もロジックは同じ。
\begin{array}{ccc} u_3 &=& c_1^*u_1+c_2^*u_2 \end{array}
こうならない以上
(線形独立という仮定)
\begin{array}{ccc} c^*_3 &=& \cdots &=& c_N^* &=& 0 \end{array}
こうはならないので
(この場合は成立しない形に)
\begin{array}{ccc} v_3&=& \displaystyle -\frac{c_1}{c_3}u_1 - \frac{c_2}{c_3}u_2 + \frac{1}{c_3}u_3 - \cdots - \frac{c_N}{c_3}v_N \end{array}
このようにとれると言えることから
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ u_1,u_2,u_3,v_4,...,v_N \} ) \end{array}
こうなると言えます。
線形独立にできる限界がある
↑ の操作は何回もできるため
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ u_1,u_2,...,u_k,v_{k+1},...,v_N \} ) \end{array}
「 u_n が無限個存在する」以上
このようになるのは確実であり
\begin{array}{ccc} \Bigl| \{ v_1,v_2,...,v_N \} \Bigr| &=&N \end{array}
V_* の要素数が N であることから
(これは定義である前提から分かる事実)
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ u_1,u_2,...,u_N \} ) \end{array}
k=N の場合では
これが V を生成することも明らかだと言えます。
ということは
u_{N+1} というベクトルを考えた時
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ u_1,u_2,...,u_N \} ) \end{array}
これで全ての要素を線形結合で表現できることから
\begin{array}{lcl} u_{N+1} &\in& \mathrm{Span} ( \{ u_1,u_2,...,u_N \} ) \\ \\ u_{N+1} &=& c_1u_1+c_2u_2+\cdots+c_Nu_N \end{array}
u_{N+1} はこのように表現可能だと言えるので
(この時点で線形独立に反する)
\begin{array}{ccc} \{ u_1,u_2,...,u_N,u_{N+1} \} \end{array}
これは「線形独立」になりません。
同様に
\begin{array}{ccc} u_{N+2} &=& c_1u_1+c_2u_2+\cdots+c_Nu_N \\ \\ u_{N+3} &=& c_1u_1+c_2u_2+\cdots+c_Nu_N \\ \\ &\vdots \end{array}
N+1 以降の u_n は
全て V の要素ですから
\begin{array}{ccc} \{ u_1,u_2,u_3,...,u_n,u_{n+1},... \} \end{array}
この「無限集合が線形独立である」という仮定
\begin{array}{lcl} u_{N+1} &=& c_1u_1+c_2u_2+\cdots+c_Nu_N \\ \\ u_{N+1} &=& c_1u_1+c_2u_2+\cdots+c_Nu_N + 0( u_{N+2} + \cdots ) \end{array}
これは部分集合と同様の理屈で
( 1 と N の間に 0 ではない c_k が存在する)
\begin{array}{lcl} V &=& \mathrm{Span} ( \{ v_1,v_2,...,v_N \} ) \\ \\ V &=& \mathrm{Span} ( \{ u_1,u_2,...,u_N \} ) \end{array}
前提に矛盾すると言えます。
有限 ⇒ 存在
「線形独立な集合は全て有限」
こちらの方を前提とした時
\begin{array}{ccc} \Big| \{ v_1,v_2,...,v_n \} \Bigr| &<& \infty \end{array}
これから「有限集合で V を表現可能」を得るには
\begin{array}{ccc} \Big| \{ v_1,v_2,...,v_n \} \Bigr| &<& N \end{array}
「最大の線形独立な集合」を考える必要があります。
(全て有限なら最大値 N もまた有限)
というのも
\begin{array}{ccc} V &=& \mathrm{Span}(\{ v_1,v_2,...,v_N \}) \end{array}
3 次元などの具体例を考えると
これが「 V を生成する」と推定できるので
( 3 次元なら 3 個で十分なため)
「サイズが最大の線形独立な集合」が
\begin{array}{ccc} V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_N \}) &≠& ∅ \end{array}
「 V を生成しない」と仮定すると
まず間違いなく矛盾すると予想ができます。
線形独立なベクトルを選べる
先に確認した通り
\begin{array}{ccc} v_{N+1} &\in& V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_N \}) \end{array}
この操作を行えば
「線形独立なベクトル v_{N+1} 」を選び
(これが線形独立ではないとすると矛盾する)
\begin{array}{ccc} \{ v_1,v_2,...,v_N,v_{N+1} \} \end{array}
新たに「線形独立な集合」を作ることができます。
(あくまでこのような v_{N+1} が存在するなら)
ということは
\begin{array}{ccc} \{ v_1,v_2,...,v_N \} \end{array}
「最大サイズであるはずの線形独立な集合」より
(これは前提から得られる事実)
\begin{array}{ccc} \{ v_1,v_2,...,v_N,v_{N+1} \} \end{array}
これは「線形独立」でありながら
「要素数が N より多い集合」になるので
この事実は
\begin{array}{ccc} \Big| \{ v_1,v_2,...,v_N,v_{N+1} \} \Bigr| &<& N && × \end{array}
「最大の線形独立な集合」という前提に矛盾します。
結果
「最大の集合は V を生成できない」
この仮定は前提に矛盾することから
\begin{array}{ccc} V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_N \}) &≠& ∅ \end{array}
この仮定は誤りであると言えます。
まとめると
「最大の線形独立な集合」を考える場合
\begin{array}{ccc} V &=& \mathrm{Span}(\{ v_1,v_2,...,v_N \}) \end{array}
これは必ずこうなります。
(有限個のベクトルで V を表現可能)
有限次元ベクトル空間と基底の存在
以上をまとめると
\begin{array}{lcl} v_2 &\in& V\setminus \mathrm{Span}(\{ v_1 \}) \\ \\ v_3 &\in& V\setminus \mathrm{Span}(\{ v_1,v_2 \}) \end{array}
「初期値 \{v_1\} 」から「一定の後者規則」により
\begin{array}{ccc} v_{n+1}&\in&V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_n \}) \end{array}
「線形独立なベクトルの集合」を作れることと
\begin{array}{ccc} c_{n+1}=0 && c_1v_1+\cdots+c_nv_n=\vec{0} && 線型独立 \\ \\ c_{n+1}≠0 && \displaystyle v_{n+1}=\frac{-c_1}{c_{n+1}}v_1+\cdots+\frac{-c_n}{c_{n+1}}v_n && v_{n+1} \in \mathrm{Span}(\{v_1,...,v_n\}) \end{array}
「有限次元ベクトル空間」の中身が
\begin{array}{ccc} V&=&\mathrm{Span}(\{ v_1,v_2,...,v_N \}) \end{array}
「無限次元ベクトルではない」ことより
(線形独立な部分集合は全て要素数が有限)
\begin{array}{ccc} V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_N \}) &=& ∅ \end{array}
この操作は確実に「有限回で終わる」ことから
(唯一存在定理によりこの回数 N が定まる)
結果として
「有限次元ベクトル空間」には
\begin{array}{ccc} \{ v_1,v_2,...,v_N \} \end{array}
「必ず基底が存在する」という結論が導かれます。
(要素数が一定かなどの詳細はまだ不明)
基底の複数存在定理
「 2,3 次元での具体例」や
「基底の存在定理」から直感的には明らかですが
\begin{array}{ccc} V&=&\mathrm{Span}(\{(1,0),(0,1)\}) \\ \\ V&=&\mathrm{Span}(\{(1,1),(1,2)\}) \end{array}
「全ての有限次元ベクトル空間」でそうなるか
\begin{array}{lcl} V &=& \mathrm{Span}(\{ v_1,v_2,...,v_n \}) \\ \\ V &=& \mathrm{Span}(\{ v_1,v_2,...,v_m \}) \end{array}
これはまだ不明なので
ここで念のために証明しておきます。
例外の処理
実際問題として
\begin{array}{ccc} V&=&\{ \vec{0} \} \end{array}
このような「有限次元ベクトル空間」を考えると
これには「複数の基底」が存在しません。
逆元を -1=1 とする例など
( Z_2 は二元体という最小の体 \mathrm{Field} )
\begin{array}{ccc} 0,1 &\in& Z_2 \\ \\ \vec{0},v &\in&V \end{array}
極端に小さなベクトル空間に限りますが
「複数の基底が存在する」は非自明です。
複数存在するだろう最小のサイズ
↑ の例外を見るに
\begin{array}{ccc} -1,0,1 &\in& Z_3 \\ \\ -v,\vec{0},v &\in&V \end{array}
「基底が複数存在する」と言える前提は
\begin{array}{ccc} \{-v\} & \{v\} \end{array}
これが最小だと言えそうですが
(定義上は最小から増やしてるので明らか)
最小かどうかは議論の余地ありで
\begin{array}{ccc} 0,1 &\in& Z_2 \end{array}
というのも
例えば「要素数 2 の基底」を考えてみると
\begin{array}{ccc} v_1,v_2 &\in& V \end{array}
これは「二元体 Z_2 」であっても
\begin{array}{ccc} \{(1,0),(0,1)\} \\ \\ \{ (1,1),(0,1) \} \end{array}
「基底が複数存在する」と言えるので
こちらの増やし方も最小であると解釈できます。
基底が1つしかないと仮定する
以上より
\begin{array}{ccc} B &=& \{v_1,v_2,v_3,...,v_n\} \end{array}
「基底の存在定理」から
「基底が最低でも1つ存在する」とした上で
\begin{array}{ccc} \Bigl( |B|=1 ∧ 3≤|F| \Bigr) &∨& 2≤|B| \end{array}
「要素数 1 なら体 F の要素数は 3 以上」
または「要素数 2 以上」を前提としてみます。
(直感的にこれ以上だと基底は複数個になるはず)
そうすると
雑に構成してみても
\begin{array}{ccc} \{ (1,0,0),(0,1,0),(0,0,1) \} \\ \\ \{ (1,1,0),(0,1,0),(0,0,1) \} \end{array}
単純な和で複数の基底が構成できるので
\begin{array}{ccc} B &=& B^{\prime} \end{array}
「基底が1つしかない」と仮定した場合
\begin{array}{ccc} v_* \not\in B ∧ v_* \in B^{\prime} &→& B ≠ B^{\prime} \end{array}
これが矛盾を導くことは容易に推測できます。
(異なる要素が1つでも基底の中にあれば良いので)
反例の構成
この証明の核となる「反例」
これは無数に考えられますが
\begin{array}{ccc} \{ (1,0,0),(0,1,0),(0,0,1) \} \\ \\ \{ (1,1,0),(0,1,0),(0,0,1) \} \end{array}
この形を考えると
\begin{array}{ccc} v_* &=& v_1+v_2 \end{array}
最もシンプルな形として
このような形を推定することができます。
(この時点ではこれが常に反例になるか不明)
ざっと確認してみても
\begin{array}{ccc} v_1& v_2 & v_3 & v_4 \\ \\ (1,0,0,0) &(0,1,0,0)& (0,0,1,0) & (0,0,0,1) \end{array}
v_1,v_2 は他と「線型従属ではない」ですし
(これは基底の定義から明らかとして良い)
\begin{array}{ccc} (1,1,0,0) \end{array}
これも「線型従属ではありません」
それに v_1,v_2 であれば
\begin{array}{ccc} v_1 &=& v_1+v_2 - v_2 \\ \\ (1,0,0,0) &=& (1,1,0,0)- (0,1,0,0) \end{array}
v_1+v_2 ともう片方で表現可能なので
V の生成も問題無くできそうです。
(順番的には具体例の比較の後にこれを確認してる)
反例だと予想される集合の中身
まず確認しておくと
\begin{array}{ccc} B &=& \{ v_1,v_2,...,v_n \} \end{array}
この「基底 B 」は「線形独立」です。
(これは基底の定義の1つなので明らか)
ということは
\begin{array}{ccc} V &=& \mathrm{Span}(\{ v_1,v_2,...,v_n \}) \end{array}
「 V を生成する」以上
(これも基底の定義の1つなので明らか)
\begin{array}{ccc} v_1+v_2 &\in & V \end{array}
各要素の線形結合は
必ずこうなると言えるので
\begin{array}{ccc} B^{\prime} &=& \{ v_1+v_2,v_2,...,v_n \} \end{array}
1つの要素を入れ替えた
これもまた「 V の部分集合」になります。
そして v_1+v_2 は
\begin{array}{ccl} v_1+v_2 &=& v_1 && × \\ \\ v_1+v_2 &=& v_2 && × \end{array}
「線形独立」である以上
明らかに元のベクトルとは異なる上に
(基底の要素は \vec{0} ではない)
\begin{array}{lccc} v_1+v_2 &=& v_k && × \\ \\ v_1+v_2 - v_k &=& \vec{0} && 線型独立ではない \end{array}
その他のベクトルとも異なるので
(基底の要素である v_k は v_1,v_2 と線形独立)
\begin{array}{ccc} \forall k \in \{ 1,2,...,n \} & v_k≠v_1+v_2 \end{array}
「全ての v_k と異なるベクトル」になると言えるため
以上の結果から
「外延性公理」より
\begin{array}{ccc} \forall e \,\, \Bigl( e\in A ⇔ e\in B \Bigr) &⇒& A=B \end{array}
「 B は v_1+v_2 を持たない」上に
「 B^{\prime} は v_1 を持たない」ことから
\begin{array}{lcl} B &=& \{ v_1,v_2,...,v_n \} \\ \\ B^{\prime} &=& \{ v_1+v_2,v_2,...,v_n \} \end{array}
集合 B,B^{\prime} は
「同じにならない」ということが分かります。
反例だと予想される集合は基底であるか
「 V の線形独立な部分集合 B^{\prime} 」は
「基底 B とは異なる集合」である
これは分かりましたが
\begin{array}{ccc} B^{\prime} &=& \{ v_1+v_2,v_2,...,v_n \} \end{array}
これが「基底であるか」はまだ分かっていません。
(基底になる具体例は標準基底から得られている)
先に確認した通り
\begin{array}{lccc} v_1+v_2 &=& v_k && × \\ \\ v_1+v_2 - v_k &=& \vec{0} && 線型独立ではない \end{array}
「線形独立」であることは分かっていますが
( B^{\prime} の他の要素は v_1 以外 B と同じ)
\begin{array}{ccc} V &=& \mathrm{Span}(\{ v_1+v_2,v_2,...,v_n \}) && ? \end{array}
これが「 V を生成するか」はまだ不明です。
(具体例を見るに直感的には生成しそう)
ただ具体例を参考に
「基底 B 」の定義を確認してみると
\begin{array}{ccc} v &=& c_1^*v_1+c_2^*v_2+\cdots+ c_n^*v_n \end{array}
線形結合の形はこうですから
( V の全ての要素を表現できる)
\begin{array}{ccc} v_1 &\to& v_1+v_2 \end{array}
集合の中身がほとんど同じであることを考えると
(線形結合の形はほぼ同じになる)
\begin{array}{ccc} v_1&=& 1 \cdot (v_1+v_2) + (- 1) \cdot v_2\end{array}
v_1 はこんな形ですし
( B^{\prime} の要素の線形結合で表現可能)
\begin{array}{lcl} c_1(v_1+v_2) + c_2v_2+\cdots+ c^*_nv_n \\ \\ c_1v_1 + (c_1+c_2) v_2 + \cdots + c^*_n v_n \end{array}
このようになると言えるので
\begin{array}{ccc} c_2&=& c^*_2-c_1 \end{array}
後はこれをこのように解釈すれば
\begin{array}{lcc} c_1v_1 + (c_1+c_2) v_2 + \cdots + c^*_n v_n \\ \\ c_1v_1 + (c_1+c_2^* - c_1)v_2 + \cdots + c_n v_n \end{array}
「 B^{\prime} の線形結合」は
このように「基底 B の線形結合」の形になるので
\begin{array}{ccc} v&=& c_1(v_1+v_2) + c_2v_2+\cdots+ c^*_nv_n \end{array}
「 V の部分集合 B^{\prime} 」は
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ v_1+v_2,v_2,...,v_n \} ) \end{array}
「 V の全ての要素を表現できる」と言えます。
( V を生成するという条件を満たす)
基底は複数存在する
まとめると
\begin{array}{lcl} B &=& \{ v_1,v_2,...,v_n \} \\ \\ B^{\prime} &=& \{ v_1+v_2,v_2,...,v_n \} \end{array}
「基底 B 」と比較して
\begin{array}{ccc} B &≠& B^{\prime} \end{array}
「要素が1つだけ異なる B^{\prime} 」を考えた時
(線形独立なので \forall k \in \{ 1,2,...,n \} \,\, v_k≠v_1+v_2 )
この B^{\prime} は「線形独立」になり
\begin{array}{lccc} v_1+v_2 &=& v_k && × \\ \\ v_1+v_2 - v_k &=& \vec{0} && 線型独立ではない \end{array}
「基底」の定義から
\begin{array}{ccl} v&=& c_1(v_1+v_2) + c_2v_2+\cdots+ c^*_nv_n \\ \\ &=& c_1v_1 + (c_1+c_2) v_2 + \cdots + c^*_n v_n \end{array}
「 V を生成する」ことも明らかなので
\begin{array}{ccc} V &=& \mathrm{Span} ( \{ v_1+v_2,v_2,...,v_n \} ) \end{array}
「 B^{\prime} は基底の定義を満たす」ことから
「基底は複数存在する」という結論が得られます。
基底の要素数の唯一性
これは「基底の要素数は全て同じ」という
「基底の要素数」に関することを主張する定理です。
\begin{array}{ccc} |B_1| &=& |B_2| &=& \cdots \end{array}
「基底の要素数」が「次元」である
\begin{array}{ccc} \mathrm{Dim}(V) &=& \mathrm{Cardinal}\Bigl( \mathrm{Basis}(V) \Bigr) \end{array}
この定理はこれを厳密に保証してくれます。
(これにより次元という概念がきちんと定まる)
基底の存在と要素数
「基底の存在定理」より
\begin{array}{lcl} B_1 &=& \{ v_1,v_2,...,v_n \} \\ \\ B_2 &=& \{ u_1,u_2,...,u_m \} \end{array}
V には必ず「基底が存在する」わけですが
\begin{array}{ccc} |B_1|&<&|B_2| && ? \\ \\ |B_1|&=&|B_2| && ? \\ \\ |B_1|&>&|B_2| && ? \end{array}
この時点で
「要素数」について分かっていることはありません。
直感的にも結果的にも
\begin{array}{ccc} |B_1|&=&|B_2| \end{array}
こうなることは分かりますが
これは定義から直接的に得られる結論じゃないです。
基底の定義から分かること
3 次元の話ではありますが
\begin{array}{ccc} (x,y,z)&=& x(1,0,0)+y(0,1,0)+z(0,0,1) \end{array}
「標準基底」を用いれば
\begin{array}{ccc} (2,0,0),(0,3,0),(0,0,4) \\ \\ (1,2,0),(0,3,4),(5,0,6) \end{array}
このような
「要素数が同じになる基底」は
特に難しい手順を必要とせず作れます。
そしてこの具体例を考えると
「要素数が同じになることはある」と言えて
\begin{array}{ccc} a_1v_1+b_1v_2 &=& v_3 \\ \\ a_2v_1+c_2v_3 &=& v_2 \\ \\ b_2v_2+c_3v_3 &=& v_1 \end{array}
更に「線形独立」を確認できる
\begin{array}{ccc} a_1v_{11}+b_1v_{21} &=& v_{31} \\ \\ a_1v_{12}+b_1v_{22} &=& v_{32} \\ \\ \vdots \\ \\ a_1v_{1n}+b_1v_{2n} &=& v_{3n} \end{array}
「連立方程式」の形を考えると
基本、同じ数にしかならないと推定できます。
(標準基底への変換手順が連立方程式そのもの)
線形結合と連立方程式
詳細は長くなるので省きますが
\begin{array}{ccc} \begin{pmatrix} e_1 \\ e_2 \\ e_3 \end{pmatrix} &=& c_1 \begin{pmatrix} v_{11} \\ v_{12} \\ v_{13} \end{pmatrix} + c_2 \begin{pmatrix} v_{21} \\ v_{22} \\ v_{23} \end{pmatrix} + c_3 \begin{pmatrix} v_{31} \\ v_{32} \\ v_{33} \end{pmatrix} \end{array}
「次元」に差がある
つまり n≠m とした場合
\begin{array}{ccc} \begin{pmatrix} e_1 \\ e_2 \\ 0 \end{pmatrix} &=& c_1 \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} + c_2 \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix}+ c_3 \begin{pmatrix} 1 \\ 1 \\ 0 \end{pmatrix} \end{array}
この解の中に
\begin{array}{ccc} c_1+c_3 &=& e_1 \\ \\ c_2+c_3&=& e_2 \end{array}
「任意の解が必要である」というのは
\begin{array}{ccc} \left\{ \begin{array}{ccc} x+z&=& 1 \\ \\ y+z&=& 0 \end{array} \right. \end{array}
直感的に理解できると思います。
(どれかを任意定数にしないと解が得られない)
この事実を踏まえると
\begin{array}{lcl} B_1 &=& \{ v_1,v_2,...,v_n \} \\ \\ B_2 &=& \{ u_1,u_2,...,u_m \} \end{array}
「基底」が V の要素を全て表現できることから
(これは基底の存在定理と定義より明らか)
\begin{array}{ccc} u_1&=& c_{11} v_1 +c_{12} v_2+\cdots + c_{1n} v_n \\ \\ u_2&=& c_{21} v_1 +c_{22} v_2+\cdots + c_{2n} v_n \\ \\ & & \vdots \\ \\ u_m&=& c_{m1} v_1 +c_{m2} v_2+\cdots + c_{mn} v_n \end{array}
こうなることも明らかだと言えます。
とすると
\begin{array}{ccc} c^*_1 u_1 + c^*_2 u_2 +\cdots + c^*_m u_m &=& \vec{0} \end{array}
「線形独立」の定義を意識しつつ
(これらの定数は全て 0 になるはず)
ちゃんと「線形独立」になるか
(まず ↑ の線形独立を用いず ↓ の線形結合を得る)
\begin{array}{lclcl} c^*_1 u_1 &+& \cdots &+ & c^*_m u_m &=& \vec{0} \\ \\ c^*_1(c_{11} v_1 +\cdots + c_{1n} v_n) &+& \cdots &+ & c^*_m (c_{m1} v_1 +\cdots + c_{mn} v_n) &=& \vec{0} \end{array}
以下のように式を変形し
\begin{array}{ccc} (c^*_{1}c_{11} + c^*_{2}c_{21} + \cdots + c^*_{m}c_{m1} ) & v_1 \\ \\ (c^*_{2}c_{12} + c^*_{2}c_{22} + \cdots + c^*_{m}c_{m2} ) & v_2 \\ \\ \vdots \\ \\ (c^*_{n}c_{1n} + c^*_{n}c_{2n} + \cdots + c^*_{m}c_{mn} ) & v_n \end{array}
「連立方程式」を考えて確認してみると
(線形独立なのでこれも 0 になる必要がある)
\begin{array}{ccc} c^*_{1}c_{11} + c^*_{2}c_{21} + \cdots + c^*_{m}c_{m1} &=& 0 \\ \\ c^*_{2}c_{12} + c^*_{2}c_{22} + \cdots + c^*_{m}c_{m2} &=& 0 \\ \\ \vdots \\ \\ c^*_{n}c_{1n} + c^*_{n}c_{2n} + \cdots + c^*_{m}c_{mn} &=& 0 \end{array}
「変数 c^*_k の数 m 」と「式の数 n 」から
例えば n<m としてしまうと
「中身がなんでもいい解」が出てきてしまうので
(この任意定数解の詳細は長くなるので別の記事で)
\begin{array}{ccc} c^*_k &=& t \end{array}
このパターンでは
「任意定数 c^*_k の存在」により
( v の方の線形独立から得られた結果)
\begin{array}{ccc} c^*_1 u_1 + c^*_2 u_2 +\cdots + c^*_m u_m &=& \vec{0} \end{array}
この「線形独立」の定義に矛盾する。
そんな結論が得られてしまいます。
(こちらの方の線形独立に合致しない)
連立方程式の任意定数と線形独立
ざっとまとめると
\begin{array}{ccc} u_1&=& c_{11} v_1 +c_{12} v_2+\cdots + c_{1n} v_n \\ \\ u_2&=& c_{21} v_1 +c_{22} v_2+\cdots + c_{2n} v_n \\ \\ & & \vdots \\ \\ u_m&=& c_{m1} v_1 +c_{m2} v_2+\cdots + c_{mn} v_n \end{array}
「基底」の定義と
「線形独立の判定式」から
\begin{array}{lclcl} c^*_1 u_1 &+& \cdots &+ & c^*_m u_m &=& \vec{0} \\ \\ c^*_1(c_{11} v_1 +\cdots + c_{1n} v_n) &+& \cdots &+ & c^*_m (c_{m1} v_1 +\cdots + c_{mn} v_n) &=& \vec{0} \end{array}
この式が得られて
\begin{array}{ccc} c^*_{1}c_{11} + c^*_{2}c_{21} + \cdots + c^*_{m}c_{m1} &=& 0 \\ \\ c^*_{2}c_{12} + c^*_{2}c_{22} + \cdots + c^*_{m}c_{m2} &=& 0 \\ \\ \vdots \\ \\ c^*_{n}c_{1n} + c^*_{n}c_{2n} + \cdots + c^*_{m}c_{mn} &=& 0 \end{array}
「 v の線形独立性」によりこうなるが
これは n<m の場合では
「任意の定数解」を持つ連立方程式になるので
\begin{array}{ccc} c^*_1 u_1 + c^*_2 u_2 +\cdots + c^*_m u_m &=& \vec{0} \end{array}
こちらの「線形独立性」に矛盾してしまう。
( v の方から u の線形独立性が否定される)
↑ の話を要約すると
こんな感じの内容になるんですが
これは n<m の場合だけでなく
\begin{array}{ccc} v_1&=& c_{11} u_1 +c_{12} u_2+\cdots + c_{1m} u_m \\ \\ v_2&=& c_{21} u_1 +c_{22} u_2+\cdots + c_{2m} u_m \\ \\ & & \vdots \\ \\ v_n&=& c_{n1} u_1 +c_{n2} u_2+\cdots + c_{nm} u_m \end{array}
n>m の場合でも
別方向から考えた同様の手順を踏めるので
\begin{array}{ccc} c^*_{1}c_{11} + c^*_{2}c_{21} + \cdots + c^*_{n}c_{n1} &=& 0 \\ \\ c^*_{2}c_{12} + c^*_{2}c_{22} + \cdots + c^*_{n}c_{n2} &=& 0 \\ \\ \vdots \\ \\ c^*_{m}c_{1m} + c^*_{m}c_{2m} + \cdots + c^*_{n}c_{nm} &=& 0 \end{array}
このパターンでも
同様の理由により矛盾が生じます。
等しくないと矛盾が生じる
以上より
\begin{array}{lcl} B_1 &=& \{ v_1,v_2,...,v_n \} \\ \\ B_2 &=& \{ u_1,u_2,...,u_m \} \end{array}
「線形独立」について確認できる
\begin{array}{ccc} c^*_{1}c_{11} + c^*_{2}c_{21} + \cdots + c^*_{m}c_{m1} &=& 0 \\ \\ c^*_{2}c_{12} + c^*_{2}c_{22} + \cdots + c^*_{m}c_{m2} &=& 0 \\ \\ \vdots \\ \\ c^*_{n}c_{1n} + c^*_{n}c_{2n} + \cdots + c^*_{m}c_{mn} &=& 0 \end{array}
「連立方程式の解」を考えると
\begin{array}{ccc} n&<&m \\ \\ n&>&m \end{array}
このパターンでは矛盾が生じるので
(どの基底を比較してもこれだと矛盾が生じる)
\begin{array}{ccc} n&=&m \end{array}
結果
「基底の要素数」は1つの値に定まると言えます。
(基底は複数存在するためこうでなければならない)
基底の延長定理
これは「線形独立なベクトルの集合」
この存在を前提とする定理で
(要は部分空間がある状態)
\begin{array}{ccc} \{ v_1,v_2,v_3,...,v_n \} \end{array}
これが「 V の基底にまで延長できる」
ということをこの定理は主張しています。
存在定理と次元数による必然
これは「存在定理」の証明で使った
\begin{array}{ccc} v_{n+1}&\in&V\setminus \mathrm{Span}(\{ v_1,v_2,...,v_n \}) \end{array}
『線形独立なベクトルの集合を作る操作』と
(基底になるまで不足分を補える)
\begin{array}{ccc} | \mathrm{Basis}(V)| &=& N \end{array}
「ベクトル空間の基底の要素数は同じ」という事実から
( \mathrm{Basis}(V) は V の基底を返すとします)
\begin{array}{lcl} n=N &\to& 基底 \\ \\ n<N &\to& 要素を1つ追加 \end{array}
単純な場合分けで導くことができます。
(常に n≤N であるとします)